导读 在一项必须有迪士尼(如果不是斯塔克工业公司)的律师、英国机器人专家和兼职钢铁侠角色扮演者詹姆斯·布鲁顿(James Bruton)的待命律师正在
在一项必须有迪士尼(如果不是斯塔克工业公司)的律师、英国机器人专家和兼职钢铁侠角色扮演者詹姆斯·布鲁顿(James Bruton)的待命律师正在开发的假肢中,该假肢使用机器学习和树莓派零 W自行移动. 什么可能出错?
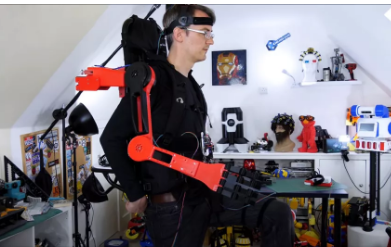
Bruton 并不热衷于在自己的头骨中嵌入电极,因此他将其他四肢视为手臂的输入来源。他创建了一套可穿戴的动作捕捉套装来收集数据,并为其配备各种微控制器,包括一个 Teensy 4.1 和一个 Adafruit MPU-6050 测量单元。一个类似的集合体安装在头带上以跟踪用户的头部。
通过将来自传感器的数据提供给Raspberry Pi Zero,Bruton 能够进行重复运动训练,直到他设计和3D 打印的手臂能够根据传入的传感器数据正确预测它应该做什么。
手臂安装在背包上,可以很好地完成简单的任务,例如抬起左腿时抬起,抬起右腿时再次放下。未来的计划包括增加传感器以检测更多动作,以及使用头带而不是皮下探针使用肌电图来感知脑电波的可能性,从而允许手臂读取用户的想法。
任何热衷于追随布鲁顿叮当声的脚步的人都可以在Github上找到他的 CAD 文件和代码。