近年来,随着柔性电子皮肤的快速发展,高性能柔性触觉传感器受到越来越多的关注,并已应用于人工智能、健康监测、人机交互、可穿戴设备等诸多领域。在各种传感器中,柔性电容式触觉传感器具有灵敏度高、能耗低、响应快、结构简单等优点。
灵敏度是传感器的一个重要参数。提高灵敏度的常用方法是在界面处引入微结构并使用离子介电材料,形成具有超高比电容的纳米级离子电子界面。但由于材料的不可压缩性和结构的高稳定性设计,传感信号的线性度较差,压力响应范围较窄。高线性度的传感器有利于电容和压力之间的转换。它可以大大简化电路设计和数据处理系统,提高传感系统的响应速度。因此,生产具有高线性度和高灵敏度的柔性压力传感器 已成为柔性电子皮肤发展的关键问题。
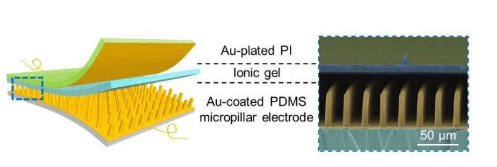
近日,南方科技大学材料科学与技术系郭传飞课题组在高线性柔性压力传感器的研究取得进展。他们通过设计具有大纵横比的表面微柱结构的柔性电极来改善结构的变形能力,该结构容易弯曲并失去稳定性。结合离子凝胶介电层,该传感器在12-176 kPa的宽压力范围内具有高线性度(R2~0.999)和高灵敏度(33.16 kPa -1)。
高线性度在于微柱结构电极与介电层的模量匹配。微柱采用硅橡胶聚二甲基硅氧烷(PDMS)制成,弹性模量为1 MPa,离子凝胶膜的弹性模量为5 MPa。通过有限元分析(FEA)可知,模量为MPa的材料在挤压微柱结构时会产生线性接触面积变化,与实验中得到的线性灵敏度相匹配。
传感器的高线性灵敏度源于表面微柱结构的设计以及电极与介电材料机械性能的匹配。欧拉稳定性原理、FEA 和扫描电子显微镜 (SEM) 表征的结合解释了线性灵敏度的原因。机械手的举重实验和抓握实验、人体脉搏检测和足底压力分布测试表明,该传感器在智能机器人、人机交互等领域具有很大的应用潜力和健康监测。这项工作也为柔性线性传感器的研究提供了新的设计思路。